Boss 自动驾驶软硬件概述。
Overview
- 软件概述
- Motion planning sub-system
==> 2 planners: avoiding static and dynamic obstacles while achieving a desired goal(最终都是产生一条 trajectory)- structured driving: road following
- unstructured driving: maneuvering in parking lots(停车场等的机动控制)
- Perception sub-system
- static obstacle map
- moving obstacles
- location relative to the road
- Mission planner
- optimal path given knowledge of the road network
- Behavioral sub-system
- Lane Driving
- Intersection Handling
- Goal Selection:分配 execution tasks
- Software infrastructure(软件基础框架) and tools
==> online data logging, offline data log playback and visualization.
- Motion planning sub-system
- 硬件概述
- With electric motors to
- 转向
- 踩刹车
- shift the transmission 换挡、变速器
- 保留 normal human driving controls:steering wheel、brake、gas pedal
- Two independent power busses
- remaining 12VDC battery and harnesses(电池和线束)
- an upgraded high-output alternator:24VDC
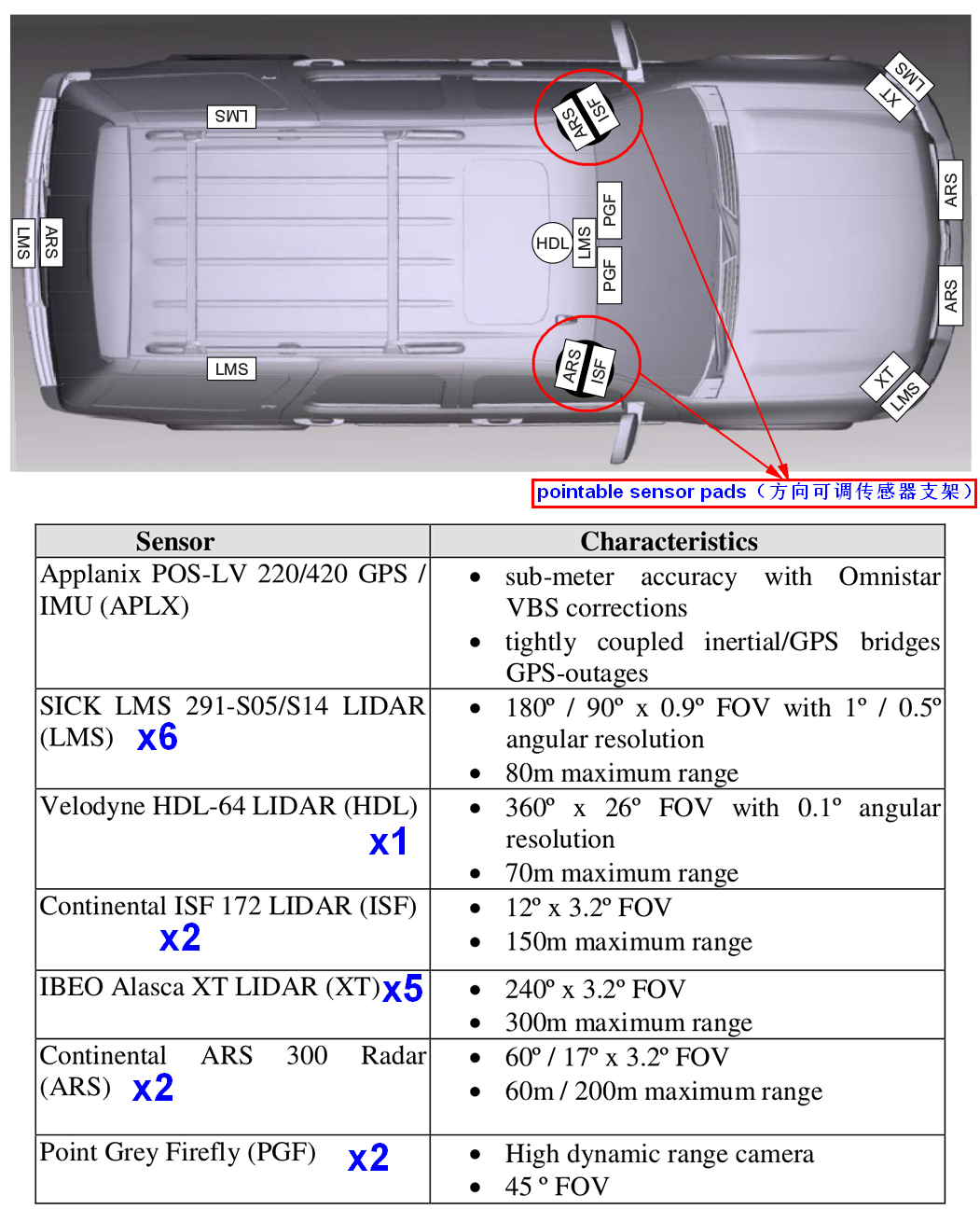
- Sensors 感知传感器
- With electric motors to