二分图匹配问题
二分图
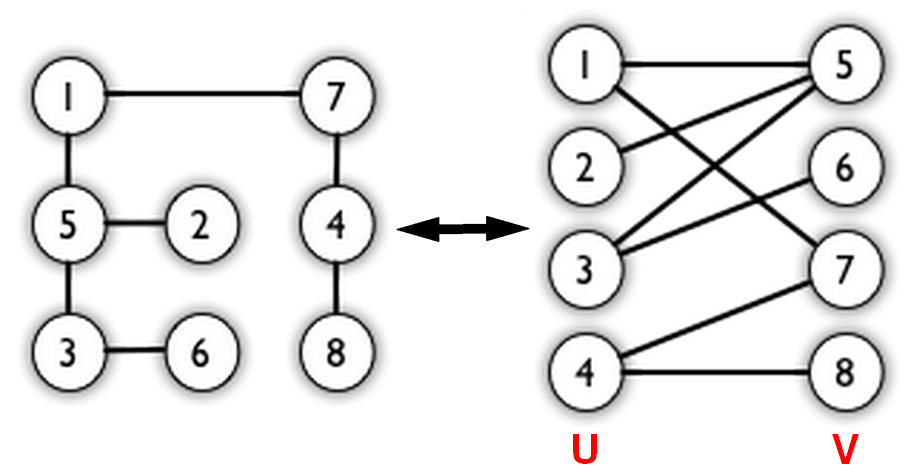
顶点被分成两个不相交的集合($U$ 和 $V$)并且同属一个集合内的点两两不相连($E_{in U} = E_{in V} = \emptyset$),即要么没有圈,要么圈所包含的边数必定是偶数。
二分图 的一个等价定义是:不含有 含奇数条边的环 的图。
匹配 是边的集合 $M$($M \subseteq E$),其中任意的两条边不共点:$e_1, e_2 \in M, e_1 \cap e_2 = \varnothing $
集合 $M$ 中的元素(边),称为 匹配边
匹配边所连接的点被称为 匹配点
同理可以定义 非匹配边 和 非匹配点 的概念
最大匹配
对于一个二分图可能有多种匹配,如果二分图里的某一个匹配包含的边的数量,在该二分图的所有匹配中最大,那么这个匹配称为 最大匹配
如果一个图的某个匹配中,所有的顶点都是匹配点 (可能会残留一些边不是匹配边),那么它就是一个 完美匹配 。
显然,完美匹配 一定是 最大匹配 (完美匹配 的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突);但并非每个图都存在 完美匹配 ,即 最大匹配 不一定是 完美匹配 。
增广路径(增广轨)
在二分图的匹配中,如果一条路径的首尾是 非匹配点 ,路径中除此之外的(如果有)其他点均是 匹配点 ,那么这条路径就是一条 增广路径(agumenting path)/增广轨 (顾名思义是指一条可以使匹配数变多的路径)。
$A:$首尾是非匹配点,因此,增广路径的第一条和最后一条边,必然是 非匹配边 。
$B:$增广路径的第二条(如果有)和倒数第二条(如果有),必然是 匹配边 $\Longleftarrow N$ 个点($0~N-1$),$v_1, v_2, …, v_{N-3}, v_{N-2}$ 均为匹配点,且 ($v_0 → v_1$) 和 ($v_{N-2} → v_{N-1}$) 为 非匹配边 。
$C:$第三条(如果有)和倒数第三条(如果有)一定是 非匹配边 $\Longleftarrow $($v_1 → v_2$)$\in M$,($v_1 → v_2$)$\cap$($v_2 → v_3$)$= v_2$,故 ($v_2 → v_3$) 只能是 非匹配边
$A, B, C \Longrightarrow$ 增广路径从非匹配边开始,匹配边和非匹配边依次交替,最后由非匹配边结束 $\Longrightarrow$ 增广路径中,非匹配边的数目会比匹配边大 1。
在二分图的匹配中,从一个未匹配点出发,依次经过非匹配边、匹配边、非匹配边…形成的路径叫 交替路径/交替轨 。
判断一个图是否为二分图?
假设我们有一个图,我们尝试用如下的方式去给每个节点着色,总共所有的节点只能着两种颜色中的一种(假设为红色或者蓝色)。对于一个节点来说,假设它着的是某一种颜色,和它相邻的节点只能着另一种颜色。给定一个图,如果这个图满足上述的特性的话,则这个图可以称之为二分图 。
判断一个图是否为二分图必然会遍历这个图
每次在判断的时候假定一个节点的颜色为某个值,那么再将它相邻的节点颜色都设置成不同的。因为只是两种颜色,可以直接用布尔值类型来处理。
对于不属于二分图的情况,肯定是某个节点访问到一个它可以连接到的节点,而这个节点已经被访问过了,但是这个被访问过的节点和当前节点颜色是一样 。这样表明它和前面二分图的定义有冲突,所以,我们遍历整个图就是为了判断是否存在这种情况。
实际实现中需要考虑的细节。
对于所有节点对应的颜色需要定义一个boolean[] color数组
最开始访问一个节点的时候,将其对应color位设置为true,每次访问一个关联的节点时,将关联节点设置成原来节点的相反值。也就是说,比如节点$v$它的颜色为color[v],那么下一个它被关联的节点$w$的颜色则可以设置成color[w] = !color[v],正好通过取反实现了颜色的变换。
这里实现的要点还是通过dfs方法
每次碰到一个节点的时候就要判断一下是否已经访问过:①已经访问过的话,要判断颜色是否相同,相同则表明该图不是一个二分图;②没有访问过的话,则将新节点设置成当前节点的相反值。
然后就是要遍历所有节点,防止遗漏未连接的节点情况。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 bool [] color;visited[] = false ; for 所有节点 ?: if (!visited[?]) color[?] = true ; if (!dfs(?, visited, color)) bool dfs (startIdx, visited, color) visited[startIdx] = true ; for startIdx 邻接边 startIdx->?: if (!visited[?]){ color[?] = !color[startIdx]; if (!dfs(?, visited, color)) return false ; } else if (color[startIdx] == color[?]) { return false ; } return true ; }
可以看出,一个图是不是二分图并不严格要求其必须是一个连通图 。
匈牙利算法
增广路径的性质
有奇数条边
起点在二分图的左半边$U$,终点在右半边$V$
路径上的点一定是一个在左半边,一个在右半边,交替出现。(其实二分图的性质就决定了这一点,因为二分图同一边的点之间没有边相连)
整条路径上没有重复的点
起点和终点都是目前还没有配对的点,而其它所有点都是已经配好对的
路径上的所有第奇数条边都不在原匹配中,所有第偶数条边都出现在原匹配中
最后,也是最重要的一条,把增广路径上的所有第奇数条边加入到原匹配中去,并把增广路径中的所有第偶数条边从原匹配中删除(这个操作称为增广路径的 取反 ),则新的匹配数就比原匹配数增加了1个
算法思想
初始时最大匹配为空。
从二分图中找出一条路径来,让路径的起点和终点都是还没有匹配过的点,并且路径经过的连线是一条没被匹配、一条已经匹配过、再下一条又没被匹配过这样交替的出现。
找到这样的路径后,显然路径里没被匹配过的连线比已经匹配了的连线多一条,于是修改匹配图,把路径里所有匹配过的连线去掉匹配关系,把没有匹配的连线变成匹配的,这样匹配数就比原来多1。
不断执行上述操作,直到找不到这样的路径为止。
从反证法考虑,即假设存在这样的情况:当前匹配不是二分图的最大匹配,但已找不到一条新的增广路径。因为当前匹配不是二分图的最大匹配,那么在两个集合中,分别至少存在一个非匹配点。那么情况分为两种:
这两个点之间存在一条边——那么我们找到了一条新的增广路径,产生矛盾;
这两个点之间不存在直接的边,即这两个点分别都只与匹配点相连——那么:(1)如果这两个点可以用已有的匹配点相连,那么我们找到了一条新的增广路径,产生矛盾;(2)如果这两个点无法用已有的匹配点相连,那么这两个点也就无法增加匹配中边的数量,也就是我们已经找到了二分图的最大匹配,产生矛盾。
在所有可能的情况,上述假设都会产生矛盾。因此假设不成立,亦即贪心算法:不断地搜寻出增广路径,直到最终我们找不到新的增广路径为止,必然能求得最大匹配的解。
如果二分图的左半边 $U$ 一共有 $|V_U|$ 个点,最多找 $|V_U|$ 条增广路径,如果图中有 $|E|$ 条边,每一条增广路径把所有边遍历一遍,所以时间复杂度为 $O(|V_U|·|E|)$。
BigraphMatching.cpp 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 #include <iostream> #include <stdio.h> /* stdin */ #include <limits.h> /* INT_MAX */ #include <queue> /* queue */ using namespace std ; #define MAX_VERTEX_NUM 26 #define UNMATCHING -1 #define STARTPOINT -1 struct adjVertexNode { int adjVertexIdx; adjVertexNode* next; }; struct VertexNode { char data; int vertexIdx; int UorV; adjVertexNode* list ; }; struct Graph { VertexNode VertexNodes[MAX_VERTEX_NUM]; int vertexNum; int edgeNum; }; void CreateGraph (Graph& g) int i, j, edgeStart, edgeEnd; int UorV; adjVertexNode* adjNode; cin >> g.vertexNum >> g.edgeNum; for (i=0 ; i<g.vertexNum; i++) { cin >> g.VertexNodes[i].data >> UorV; g.VertexNodes[i].vertexIdx = i; g.VertexNodes[i].UorV = UorV; g.VertexNodes[i].list = NULL ; } for (j=0 ; j<g.edgeNum; j++) { cin >> edgeStart >> edgeEnd; adjNode = new adjVertexNode; adjNode->adjVertexIdx = edgeEnd; adjNode->next = g.VertexNodes[edgeStart].list ; g.VertexNodes[edgeStart].list = adjNode; adjNode = new adjVertexNode; adjNode->adjVertexIdx = edgeStart; adjNode->next = g.VertexNodes[edgeEnd].list ; g.VertexNodes[edgeEnd].list = adjNode; } } void PrintAdjList (const Graph& g) cout << "The adjacent list for Bigraph<U, V> is:" << endl ; for (int i=0 ; i<g.vertexNum; i++) { cout << " " << g.VertexNodes[i].data; cout << "(" ; if (g.VertexNodes[i].UorV == 0 ) { cout << "U" ; } else { cout << "V" ; } cout << ")->" ; adjVertexNode* head = g.VertexNodes[i].list ; if (head == NULL ) cout << "NULL" ; while (head != NULL ) { cout << g.VertexNodes[head->adjVertexIdx].data << " " ; head = head->next; } cout << endl ; } } void DeleteGraph (Graph& g) for (int i=0 ; i<g.vertexNum; i++) { adjVertexNode* tmp = NULL ; while (g.VertexNodes[i].list != NULL ) { tmp = g.VertexNodes[i].list ; g.VertexNodes[i].list = g.VertexNodes[i].list ->next; delete tmp; tmp = NULL ; } } } void PrintPath (const Graph& g, int prevs[], int toIdx) if (prevs[toIdx] != STARTPOINT) { PrintPath(g, prevs, prevs[toIdx]); cout << "->" ; } cout << g.VertexNodes[toIdx].data; } void PrintMatching (Graph& g, const int matchings[]) bool visited[g.vertexNum] = {false }; for (int i=0 ; i<g.vertexNum; i++) { if (matchings[i]!=-1 && !visited[i]) { cout << "\t+ " << g.VertexNodes[i].data << "<-->" << g.VertexNodes[matchings[i]].data << endl ; visited[i] = true ; visited[matchings[i]] = true ; } } cout << endl ; } int Hungarian (Graph& g, int matchings[]) int U[g.vertexNum], V[g.vertexNum]; int uSize = 0 , vSize = 0 ; for (int vertex=0 ; vertex<g.vertexNum; vertex++) { if (g.VertexNodes[vertex].UorV == 0 ) { U[uSize++] = g.VertexNodes[vertex].vertexIdx; } else { V[vSize++] = g.VertexNodes[vertex].vertexIdx; } } int matchingSize = 0 ; for (int i=0 ; i<g.vertexNum; i++) { matchings[i] = UNMATCHING; } int prevs[g.vertexNum]; queue <int > bfsVertexQueue; cout << endl << "Hungarian Algorithm's Process: " << endl ; for (int vertexInU=0 ; vertexInU<uSize; vertexInU++) { int vertexIdx = U[vertexInU]; cout << "\t" << g.VertexNodes[vertexIdx].data << ": " ; if (matchings[vertexIdx] == UNMATCHING) { cout << "unmatched vertex" << endl ; while (!bfsVertexQueue.empty()) { bfsVertexQueue.pop(); } bool visited[g.vertexNum] = {false }; bfsVertexQueue.push(vertexIdx); visited[vertexIdx] = true ; prevs[vertexIdx] = STARTPOINT; bool pathFound = false ; while (!bfsVertexQueue.empty() && !pathFound) { int u = bfsVertexQueue.front(); bfsVertexQueue.pop(); adjVertexNode* head = g.VertexNodes[u].list ; while (head != NULL && !pathFound) { int v = head->adjVertexIdx; if (!visited[v]) { if (matchings[v] != UNMATCHING) { bfsVertexQueue.push(matchings[v]); visited[v] = true ; visited[matchings[v]] = true ; prevs[v] = u; prevs[matchings[v]] = v; } else { prevs[v] = u; pathFound = true ; cout << "\t\tAugumenting path: " ; PrintPath(g, prevs, v); cout << endl ; int curIdx = v, prevIdx = u; bool isMatchedEdge = false ; while (prevIdx != STARTPOINT) { if (!isMatchedEdge) { matchings[curIdx] = prevIdx; matchings[prevIdx] = curIdx; } isMatchedEdge = !isMatchedEdge; curIdx = prevIdx; prevIdx = prevs[prevIdx]; } } } head = head->next; } } if (matchings[vertexIdx] != UNMATCHING) { matchingSize++; } } else { cout << "matched vertex" << endl ; } } return matchingSize; } int main (int argc, const char ** argv) #ifdef USE_GRAPH1 freopen("Bigraph1.txt" , "r" , stdin ); #else freopen("Bigraph2.txt" , "r" , stdin ); #endif Graph g; CreateGraph(g); PrintAdjList(g); int matchings[g.vertexNum]; int matchingSize = Hungarian(g, matchings); cout << endl ; cout << "Maximum Matching: #" << matchingSize << endl ; PrintMatching(g, matchings); DeleteGraph(g); return 0 ; }
代码实现细节如下
int Hungarian(Graph& g, int matchings[]) 函数根据传入的二分图 g,运行匈牙利算法 确定该二分图的最大匹配数并返回,对应的匹配信息通过 matchings 数组返回。从左边 $U$ 顶点集第 1 个顶点开始,挑选未匹配点进行搜索,寻找增广路径。
上述实现中采用BFS 进行搜索,也可以采用DFS 进行搜索。
如果经过一个未匹配点,说明搜索成功:根据增广路径更新匹配信息,最大匹配数 +1,停止搜索。
如果经过一个匹配点,
如果未能找到增广路径,则跳过这个点进行下一次搜索:事实上,此时搜索后会形成一棵匈牙利树。我们可以永久性地把它从图中删去,而不影响结果。
由于找到增广路径之后需要沿着路径更新匹配信息(取反操作),所以我们需要一个结构来记录路径上的点。DFS 通过函数递归调用隐式地使用一个栈,而 我们的 BFS 实现中使用 prevs 数组来记录增广路径上途径的点信息。
沿着增广路径更新匹配信息(取反操作)是根据增广路径上的匹配边、非匹配边交替出现的性质。
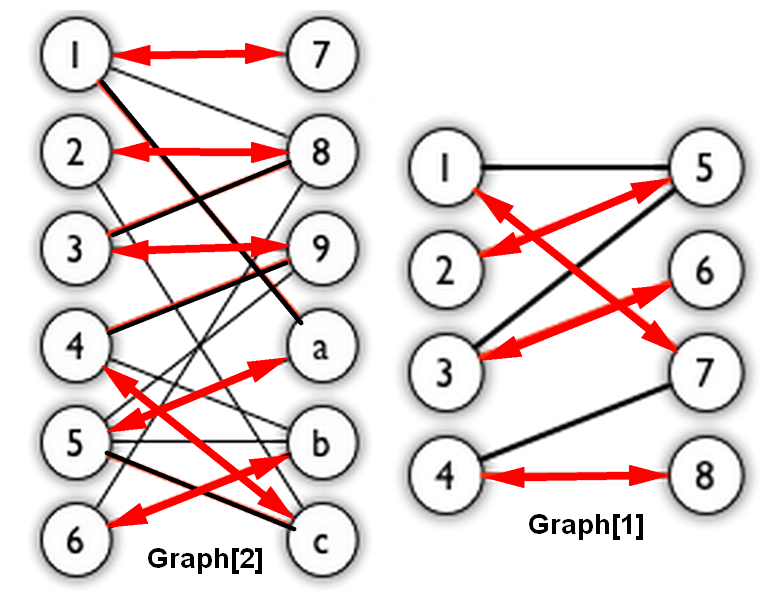
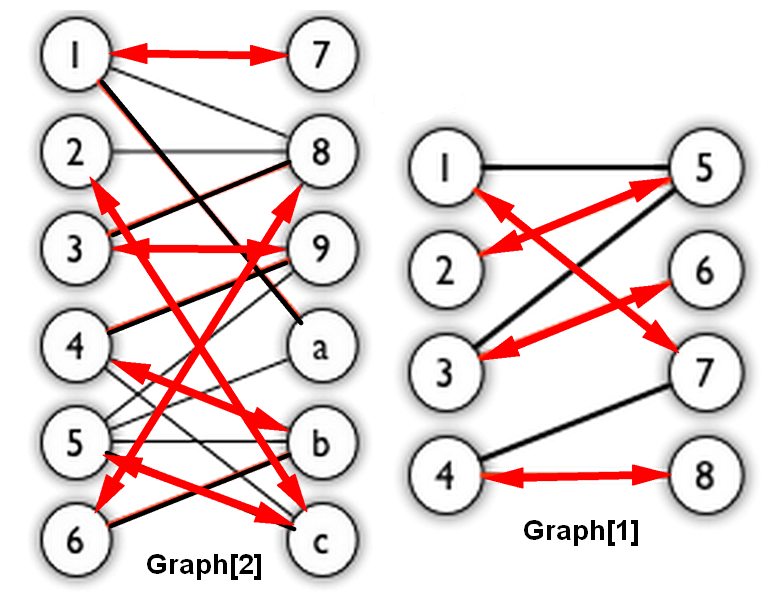
Graph[1] 输入文件如下: Bigraph1.txt 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 8 7 1 0 2 0 3 0 4 0 5 1 6 1 7 1 8 1 0 4 0 6 1 4 2 4 2 5 3 6 3 7
构建运行结果如下:1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 $ g++ -DUSE_GRAPH1 BigraphMatching.cpp -o BigraphMatching $ ./BigraphMatching The adjacent list for Bigraph<U, V> is: 1(U)-> 7 5 2(U)-> 5 3(U)-> 6 5 4(U)-> 8 7 5(V)-> 3 2 1 6(V)-> 3 7(V)-> 4 1 8(V)-> 4 Hungarian Algorithm's Process: 1: unmatched vertex Augumenting path: 1->7 2: unmatched vertex Augumenting path: 2->5 3: unmatched vertex Augumenting path: 3->6 4: unmatched vertex Augumenting path: 4->8 Maximum Matching: #4 + 1<-->7 + 2<-->5 + 3<-->6 + 4<-->8
Graph[2] 输入文件如下: Bigraph2.txt 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 12 16 1 0 2 0 3 0 4 0 5 0 6 0 7 1 8 1 9 1 a 1 b 1 c 1 0 6 0 7 0 9 1 7 1 11 2 7 2 8 3 8 3 10 3 11 4 8 4 9 4 10 4 11 5 7 5 10
构建运行结果如下:1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 $ g++ BigraphMatching.cpp -o BigraphMatching $ ./BigraphMatching The adjacent list for Bigraph<U, V> is: 1(U)-> a 8 7 2(U)-> c 8 3(U)-> 9 8 4(U)-> c b 9 5(U)-> c b a 9 6(U)-> b 8 7(V)-> 1 8(V)-> 6 3 2 1 9(V)-> 5 4 3 a(V)-> 5 1 b(V)-> 6 5 4 c(V)-> 5 4 2 Hungarian Algorithm's Process: 1: unmatched vertex Augumenting path: 1->a 2: unmatched vertex Augumenting path: 2->c 3: unmatched vertex Augumenting path: 3->9 4: unmatched vertex Augumenting path: 4->b 5: unmatched vertex Augumenting path: 5->c->2->8 6: unmatched vertex Augumenting path: 6->b->4->c->5->a->1->7 Maximum Matching: #6 + 1<-->7 + 2<-->8 + 3<-->9 + 4<-->c + 5<-->a + 6<-->b
补充概念:匈牙利树
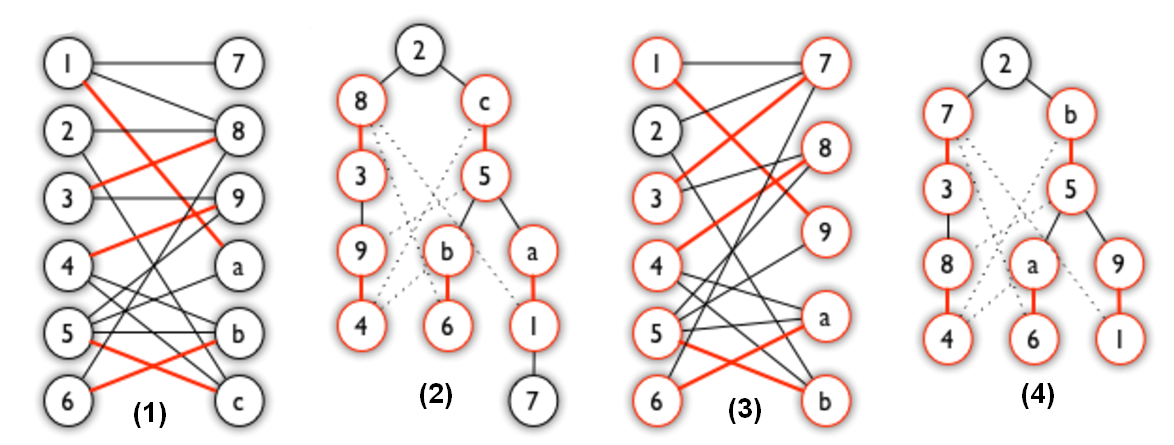
上文提到的 匈牙利树 一般由 BFS 构造(类似于 BFS 树)。从一个未匹配点出发运行 BFS(唯一的限制是,必须走交替路),直到不能再扩展为止。
上图(1),可以得到如图(2)的一棵 BFS 树:这棵树存在一个叶子节点为非匹配点(7 号),但是匈牙利树要求所有叶子节点均为匹配点,因此这不是一棵匈牙利树。相比之下,由图(3)得到的如图(4)的一棵 BFS 树,就是一棵匈牙利树。
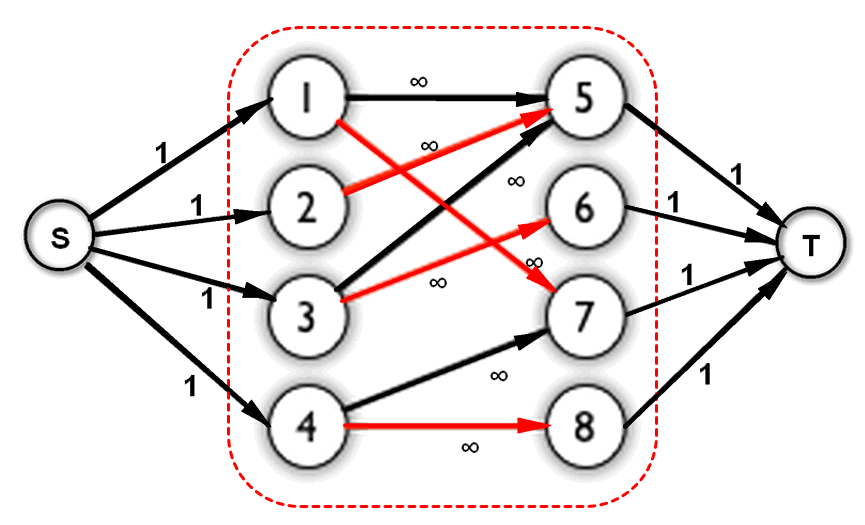
最大流方法计算最大匹配 如下图所示,对于一个二分图$G$,令已有的边的容量(Capacity)为无穷大,增加一个源点$S$和一个汇点$T$,令$S$和$T$分别连接二分图中的左半边$U$和右半边$V$,并设置其容量为1。这时得到流网络$G’$,计算得到的$G’$最大流就等于$G$的最大匹配。
算法正确性简单证明
首先假设,当前流网络有一个最大流,但它对应的不是最大匹配。那么,我们至少还可以向最大匹配中加入一条边$(u→v)$,显然我们还可以增加一条增广路径:s->u->v->t,那么就得到一个更大的流,和假设矛盾,所以假设不成立。
同理,假设当前有一个最大匹配,其对应的不是最大流,那么至少还存在一条增广路径s->u->v->t以确保更大的流,这时就可以增加边$(u→v)$到最大匹配中,同样和假设矛盾。
BigraphMatchingbyMaxFlow.cpp 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 #include <iostream> #include <iomanip> /* setw */ #include <stdio.h> /* stdin */ #include <limits.h> /* INT_MAX */ #include <queue> /* queue */ using namespace std ; #define MAX_VERTEX_NUM 26 #define UNMATCHING -1 #define STARTPOINT -1 struct adjVertexNode { int adjVertexIdx; adjVertexNode* next; }; struct VertexNode { char data; int vertexIdx; int UorV; adjVertexNode* list ; }; struct Graph { VertexNode VertexNodes[MAX_VERTEX_NUM]; int vertexNum; int edgeNum; }; void CreateGraph (Graph& g) int i, j, edgeStart, edgeEnd; int UorV; adjVertexNode* adjNode; cin >> g.vertexNum >> g.edgeNum; for (i=0 ; i<g.vertexNum; i++) { cin >> g.VertexNodes[i].data >> UorV; g.VertexNodes[i].vertexIdx = i; g.VertexNodes[i].UorV = UorV; g.VertexNodes[i].list = NULL ; } for (j=0 ; j<g.edgeNum; j++) { cin >> edgeStart >> edgeEnd; adjNode = new adjVertexNode; adjNode->adjVertexIdx = edgeEnd; adjNode->next = g.VertexNodes[edgeStart].list ; g.VertexNodes[edgeStart].list = adjNode; adjNode = new adjVertexNode; adjNode->adjVertexIdx = edgeStart; adjNode->next = g.VertexNodes[edgeEnd].list ; g.VertexNodes[edgeEnd].list = adjNode; } } void PrintAdjList (const Graph& g) cout << "The adjacent list for Bigraph<U, V> is:" << endl ; for (int i=0 ; i<g.vertexNum; i++) { cout << " " << g.VertexNodes[i].data; cout << "(" ; if (g.VertexNodes[i].UorV == 0 ) { cout << "U" ; } else { cout << "V" ; } cout << ")->" ; adjVertexNode* head = g.VertexNodes[i].list ; if (head == NULL ) cout << "NULL" ; while (head != NULL ) { cout << g.VertexNodes[head->adjVertexIdx].data << " " ; head = head->next; } cout << endl ; } } void DeleteGraph (Graph& g) for (int i=0 ; i<g.vertexNum; i++) { adjVertexNode* tmp = NULL ; while (g.VertexNodes[i].list != NULL ) { tmp = g.VertexNodes[i].list ; g.VertexNodes[i].list = g.VertexNodes[i].list ->next; delete tmp; tmp = NULL ; } } } void PrintPath (const Graph& g, int prevs[], int toIdx) if (prevs[toIdx] != STARTPOINT) { PrintPath(g, prevs, prevs[toIdx]); cout << "->" ; } if (toIdx == 0 ) { cout << "S" ; } else if (toIdx == g.vertexNum+1 ) { cout << "T" ; } else { cout << g.VertexNodes[toIdx-1 ].data; } } void PrintMatching (Graph& g, const int matchings[]) bool visited[g.vertexNum] = {false }; for (int i=0 ; i<g.vertexNum; i++) { if (matchings[i]!=-1 && !visited[i]) { cout << "\t+ " << g.VertexNodes[i].data << "<-->" << g.VertexNodes[matchings[i]].data << endl ; visited[i] = true ; visited[matchings[i]] = true ; } } cout << endl ; } bool BFS (int ** graph, int vertexNum, int fromIdx, int toIdx, int * prevs) bool visited[vertexNum]; for (int vertexIdx=0 ; vertexIdx<vertexNum; vertexIdx++) { visited[vertexIdx] = false ; prevs[vertexIdx] = -1 ; } queue <int > vertexIdxQueue; vertexIdxQueue.push(fromIdx); visited[fromIdx] = true ; while (!vertexIdxQueue.empty()) { int u = vertexIdxQueue.front(); if (u == toIdx) { break ; } vertexIdxQueue.pop(); for (int v=0 ; v<vertexNum; v++) { if (!visited[v] && graph[u][v] > 0 ) { vertexIdxQueue.push(v); visited[v] = true ; prevs[v] = u; } } } return visited[toIdx]; } int MaxMatchingbyMaxFlow (Graph& g, int matchings[]) for (int i=0 ; i<g.vertexNum; i++) { matchings[i] = UNMATCHING; } int N = g.vertexNum+2 ; int sourceIdx = 0 , sinkIdx = g.vertexNum+1 ; int maxFlow = 0 ; int flowGraph[N][N]; int ** residualGraph = new int *[N]; for (int u=0 ; u<N; u++) { residualGraph[u] = new int [N]; for (int v=0 ; v<N; v++) { residualGraph[u][v] = 0 ; flowGraph[u][v] = 0 ; } } for (int vertexIdx=0 ; vertexIdx<g.vertexNum; vertexIdx++) { if (g.VertexNodes[vertexIdx].UorV == 0 ) { residualGraph[sourceIdx][vertexIdx+1 ] = 1 ; adjVertexNode* head = g.VertexNodes[vertexIdx].list ; while (head != NULL ) { residualGraph[vertexIdx+1 ][head->adjVertexIdx+1 ] = INT_MAX; head = head->next; } } else { residualGraph[vertexIdx+1 ][sinkIdx] = 1 ; } } int prevs[N]; int iter = 1 ; cout << " Maximum Flow Algorithm Process:" << endl ; while (BFS(residualGraph, N, sourceIdx, sinkIdx, prevs)) { int pathFlow = INT_MAX; for (int v=sinkIdx; v!=sourceIdx; v=prevs[v]) { int u = prevs[v]; if (residualGraph[u][v] < pathFlow) { pathFlow = residualGraph[u][v]; } } for (int v=sinkIdx; v!=sourceIdx; v=prevs[v]) { int u = prevs[v]; residualGraph[u][v] -= pathFlow; residualGraph[v][u] += pathFlow; flowGraph[u][v] += pathFlow; } int curIdx = prevs[sinkIdx], prevIdx = prevs[curIdx]; while (prevIdx != STARTPOINT) { matchings[curIdx-1 ] = prevIdx-1 ; matchings[prevIdx-1 ] = curIdx-1 ; curIdx = prevs[prevIdx]; prevIdx = prevs[curIdx]; } maxFlow += pathFlow; cout << "\t#" << iter++ << " flow: " << setw(3 ) << pathFlow << " Augmenting-path: " ; PrintPath(g, prevs, sinkIdx); cout << endl ; } for (int i=0 ; i<N; i++) { delete [] residualGraph[i]; } delete [] residualGraph; cout << " Maximum Flow Graph:" << endl ; bool noflow; for (int u=0 ; u<g.vertexNum; u++) { noflow = true ; cout << " " << g.VertexNodes[u].data << ": " ; for (int v=0 ; v<g.vertexNum; v++) { if (flowGraph[u+1 ][v+1 ] > 0 ) { cout << "->" << g.VertexNodes[v].data << "(" << flowGraph[u+1 ][v+1 ] << ")\t" ; noflow = false ; } } if (noflow) { cout << "NULL" ; } cout << endl ; } return maxFlow; } int main (int argc, const char ** argv) #ifdef USE_GRAPH1 freopen("Bigraph1.txt" , "r" , stdin ); #else freopen("Bigraph2.txt" , "r" , stdin ); #endif Graph g; CreateGraph(g); PrintAdjList(g); int matchings[g.vertexNum]; int matchingSize = MaxMatchingbyMaxFlow(g, matchings); cout << endl ; cout << "Maximum Matching: #" << matchingSize << endl ; PrintMatching(g, matchings); DeleteGraph(g); return 0 ; }
代码实现细节如下:
int MaxMatchingbyMaxFlow(Graph& g, int matchings[]) 实现了和匈牙利算法中一样的函数接口,思路很简单,residualGraph 初始化为构造的流网络$G’$,然后调用最大流算法,得到的最大流 即为返回的最大匹配数 ;此外,利用最大流算法每次迭代搜索到的增广路径更新匹配信息matchings。因为二分图上任何匹配数目至多为$|V’| = min(|V_{\in U}|, |V_{\in V}|)$,所以流网络$G’$中最大流的值为$O(|V’|)$,因此,可以在$O(|V’|·|E’|) = O(|V|·|E|)$的时间内找出二分图的最大匹配。
利用上述最大流方法得到的匹配信息和匈牙利算法有些许区别,但可以看出,都能正确得到最大匹配,同时也是完美匹配。
Graph[1] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 $ g++ -DUSE_GRAPH1 BigraphMatchingbyMaxFlow.cpp -o BigraphMatchingbyMaxFlow $ ./BigraphMatchingbyMaxFlow The adjacent list for Bigraph<U, V> is: 1(U)-> 7 5 2(U)-> 5 3(U)-> 6 5 4(U)-> 8 7 5(V)-> 3 2 1 6(V)-> 3 7(V)-> 4 1 8(V)-> 4 Maximum Flow Algorithm Process: # 1 flow: 1 Augmenting-path: S->1->5->T # 2 flow: 1 Augmenting-path: S->3->6->T # 3 flow: 1 Augmenting-path: S->4->7->T # 4 flow: 1 Augmenting-path: S->2->5->1->7->4->8->T Maximum Flow Graph: 1: ->5(1) ->7(1) 2: ->5(1) 3: ->6(1) 4: ->7(1) ->8(1) 5: ->1(1) 6: NULL 7: ->4(1) 8: NULL Maximum Matching: #4 + 1<-->7 + 2<-->5 + 3<-->6 + 4<-->8
Graph[2] 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 $ g++ BigraphMatchingbyMaxFlow.cpp -o BigraphMatchingbyMaxFlow $ ./BigraphMatchingbyMaxFlow The adjacent list for Bigraph<U, V> is: 1(U)-> a 8 7 2(U)-> c 8 3(U)-> 9 8 4(U)-> c b 9 5(U)-> c b a 9 6(U)-> b 8 7(V)-> 1 8(V)-> 6 3 2 1 9(V)-> 5 4 3 a(V)-> 5 1 b(V)-> 6 5 4 c(V)-> 5 4 2 Maximum Flow Algorithm Process: # 1 flow: 1 Augmenting-path: S->1->7->T # 2 flow: 1 Augmenting-path: S->2->8->T # 3 flow: 1 Augmenting-path: S->3->9->T # 4 flow: 1 Augmenting-path: S->4->b->T # 5 flow: 1 Augmenting-path: S->5->a->T # 6 flow: 1 Augmenting-path: S->6->8->2->c->T Maximum Flow Graph: 1: ->7(1) 2: ->8(1) ->c(1) 3: ->9(1) 4: ->b(1) 5: ->a(1) 6: ->8(1) 7: NULL 8: ->2(1) 9: NULL a: NULL b: NULL c: NULL Maximum Matching: #6 + 1<-->7 + 2<-->c + 3<-->9 + 4<-->b + 5<-->a + 6<-->8
最大匹配与最大边独立集
边独立集即一个边集,满足边集中的任意两边不邻接。
极大边独立集(maximal edge independent set):本身为边独立集,再加入任何边都不是。
最大边独立集(maximum edge independent set):边最多的边独立集。
边独立数(edge independent number):最大边独立集的边数。
边独立集又称匹配(matching),相应的有极大匹配(maximal matching),最大匹配(maximum matching),匹配数(matching number)。
最大匹配与最小路径覆盖
给定有向图$G=(V, E)$,设$P$是$G$的一个简单路(顶点不相交)的集合。如果$V$中每个顶点恰好在$P$的一条路上,则称$P$是$G$的一个路径覆盖 。$P$中路径可以从$V$的任何一个顶点开始,长度也是任意的,特别地,可以为0(单个点)。$G$的最小路径覆盖 是$G$的所含路径条数$|P|$最少的路径覆盖。
最小路径覆盖数=$G$的点数$|V|$ - 最小路径覆盖$P$中的边的数目 ($P$由边和点组成,且不出现重复点)$\Longrightarrow$ 最小路径覆盖$P$中的边数尽量多,但是又不能让两条边在同一个顶点相交。
拆点:将每一个顶点$i$拆成两个顶点$U_i$和$V_i$。
根据原图中边的信息,从左半边$U$往右半边$V$引边,所有边的方向都是由$U$到$V$,即如果有边$(u→v)$,则在二分图$G’$中引入边$(U_u→V_v)$。
因此,所转化出的二分图$G’$的最大匹配数则是原图$G$中最小路径覆盖上的边数。因此最小路径覆盖数=原图$G$的顶点数 - 二分图$G’$的最大匹配数 便可以得解。
简单证明:最小路径覆盖数=$G$的点数$|V|$-$G’$的最大匹配数
首先,若最大匹配数为0,则二分图$G’$中无边,也就是说图$G$中不存在边,那么显然:最小路径覆盖数=$|V|$ - 最大匹配数=$|V|$ - 0=$|V|$。
若此时增加一条匹配边$(U_u→V_v)$,则在图$G$中,u、v在同一条路径上,最小路径覆盖数减少一个。继续增加匹配边,每增加一条,最小路径覆盖数减少一个,则公式:最小路径覆盖数=|V|-$G’$最大匹配数得证。
提取最小路径覆盖?
二分图$G’$的最大匹配中的匹配边对应的原图$G$中的边,加上未在边中的顶点,即为最小路径覆盖。
最大匹配与最小点覆盖
顶点覆盖问题:输入一个图$G$和预算$b$,求$b$个能够覆盖到每条边的顶点。
最小覆盖要求用最少的点(假如是二分图,$U$集合或$V$集合的都行),让每条边都至少和其中一个点关联,即假如选了一个点就相当于覆盖了以它为端点的所有边,如何需要选择最少的点来覆盖途图中的所有的边?
König定理 :一个二分图中的最大匹配数等于这个图中的最小点覆盖数。
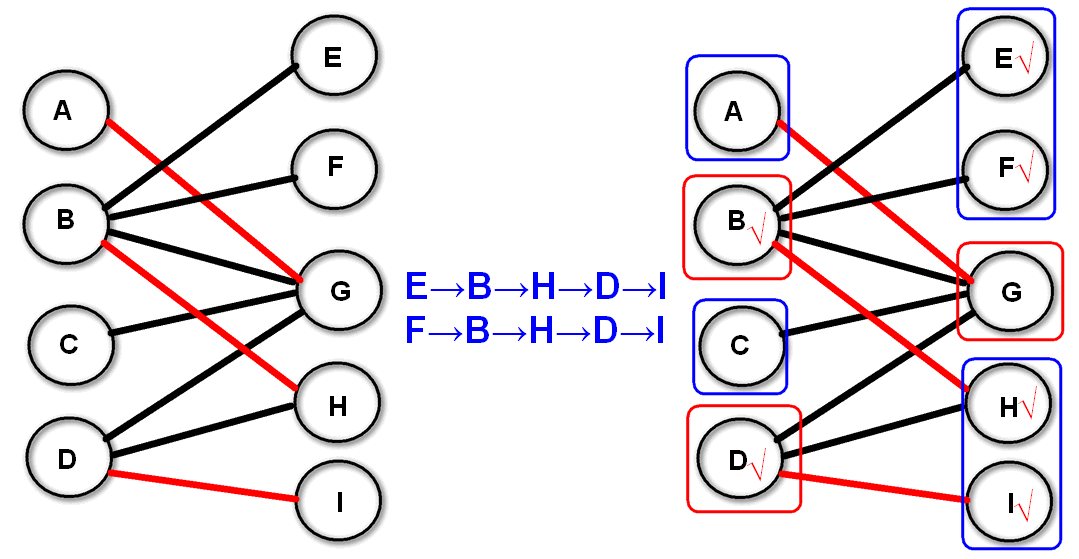
如上图,我们已经通过上述的匈牙利算法求出了最大匹配数:$M=3$,最大匹配:$(A→G)、(B→H)、(D→I)$。
匈牙利算法需要我们从左半边$U$的某个没有匹配的点,走出一条使得“一条没被匹配、一条已经匹配过,再下一条又没匹配这样交替地出现”的路(交错轨,增广轨)。但是,现在我们已经找到了最大匹配,已经不存在这样的路了。换句话说,我们能寻找到很多可能的增广路,但最后都以找不到“终点是还没有匹配过的点”而失败(如上图$[E→B→H→D→I]$和$[F→B→H→D→I]$)。我们给所有这样的点打上记号(用“√” 表示):从右半边$V$(从左半边$U$出发的增广路径已经在匈牙利算法中搜索过,重复显然没有意义)的所有没有匹配过的点出发,按照增广轨“交替出现”的要求可以走到的所有点(最后走出的路径是很多条不完整的增广路),我们将这些点一一打上标记。
那么这些点(红色矩形圈出来的点)组成了最小点覆盖点集:右边所有没有打上记号的点,加上左边已经有记号的点 。
König定理 简单证明
首先,为什么这样得到的点集,点的个数恰好有$M$个呢?
答案很简单,因为这样得到的点集中的每个点都是某条匹配边的其中一个端点。
右边所有没有打上“√” 的点和左边已经有“√” 的点 一定都是匹配边的端点。
如果右半边的哪个点是没有匹配过的,那么它早就当成起点被标记了。
如果左半边的哪个点是没有匹配过的,那就走不到它那里去,否则就找到了一条完整的增广路径,与已经求出最大匹配矛盾。
一条匹配边不可能左端点是标记了的,同时右端点是没标记的,不然的话右边的点就可以经过这条匹配边到达了(右半边到左半边通过非匹配边/左半边到右半边通过匹配边)。
因此,最后我们圈起来的点数与匹配边数。
其次,为什么这样得到的点集可以覆盖所有的边呢?
答案同样简单。不可能存在某一条边,它的左端点是没有标记的,而右端点是有标记的。
如果这条边不属于匹配边,那么左端点就可以通过这条边到达(右半边到左半边通过非匹配边/左半边到右半边通过匹配边),从而得到标记。
如果这条边属于我们的匹配边,那么右端点不可能是一条路径的起点,于是它的标记只能是从这条边的左端点过来的(匹配边的右端点不可能作为起点被标记),左端点就应该有标记。
最后,为什么这样得到的点集是最小的点覆盖集呢?
这当然是最小的,不可能有比$M$还小的点覆盖集了,因为要覆盖这$M$条匹配边至少就需要$M$个点(匹配边互不相交)。
提取最小点覆盖?
通过上述的方法对二分图$G$中的顶点进行标记,$V$中所有没有被打上记号的点,加上$U$中已经有记号的点 ,即为最小点覆盖。
最大匹配与最大独立数
独立集问题:给定一个图和整数$g$,目标是求图中的$g$个相互独立的顶点,即在任意两个这样的顶点间都不存在相连的边(或者说导出的子图是零图(没有边)的点集)。
简单证明:二分图最大独立集=顶点数-二分图最大匹配
上图,我们用红圈圈住的三个点($B$、$D$、$G$)覆盖了所有边,这是我们证明的前提条件:已经达到最小覆盖,即条件①已经覆盖所有边;条件②所用的点数最小。
首先我们来证明其余点($A$、$C$、$E$、$F$、$H$、$I$)组成的是一个独立集。
如果有两个蓝圈点间有边相连,那么这条边则没有被覆盖,则与条件①矛盾,因此是独立集。
再来证明这个独立集是最大的。
如果我们要再增加这个独立集中的点,则需要把某个红圈点变成蓝圈点。而由最小覆盖数=最大匹配数 的证明我们知道,每一个红圈点是最大匹配中的一个匹配点,也就是说每个红圈点至少连接了一条边。因此当我们将某个红圈点变成蓝圈点时,我们需要牺牲的蓝圈点的个数是≥1的。也就是说,我们最多只能找到顶点数量相等的其他独立集,而无法找到数量更大的。因此蓝圈点集必定为最大独立集。
蓝圈点数 = 总点数 - 红圈点数,即最大独立集=顶点数 - 最小覆盖集。
上面已经证明的König定理:最小点覆盖数=最大匹配数 ,故有二分图最大独立数=顶点数-二分图最大匹配数 。
References