最小二乘拟合 是一种数学上的近似和优化,利用已知的数据得出一条直线或者曲线,使之在坐标系上与已知数据之间的距离的平方和最小。
最小二乘直线拟合
- TLS(Total Least Squares) vs OLS(Ordinary Least Squares)
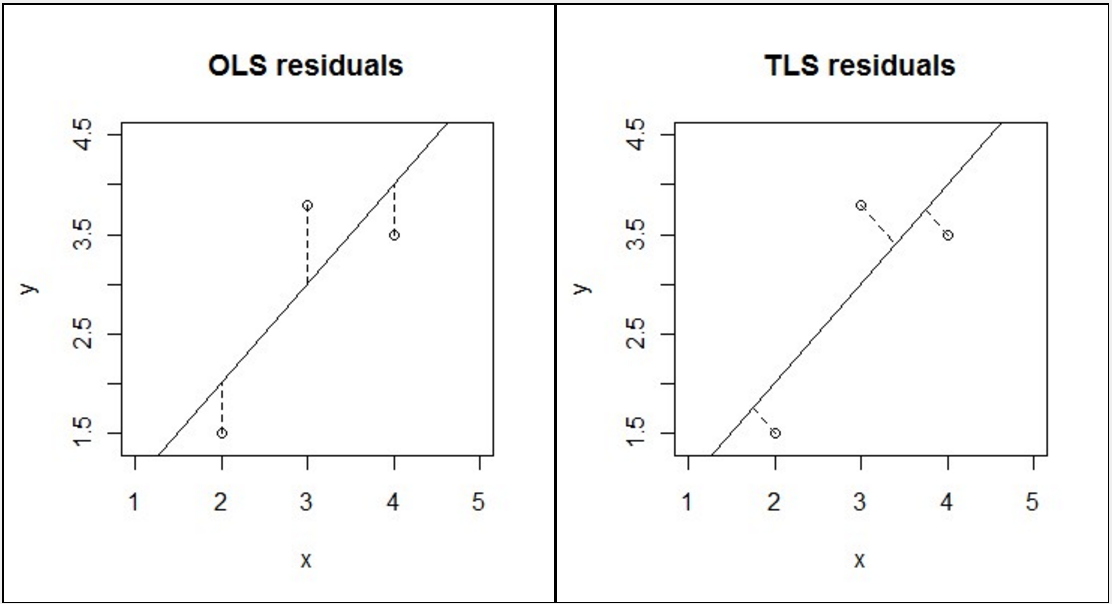
- 如上图,TLS 和 OLS 都是最小二乘拟合,只是在偏差评估上采取了不同的方式。
- 最小二乘法是一种较为简单的回归分析方法。
The simplest example of a regression model is a straight line that passes through a set of points on a scatter plot.
- Regression involves fitting a mathematical model to data.
- Regression involves estimating the mathematical relationship between one variable called the response variable (or dependent variable), and one or more explanatory variables (or independent variables)
- 最常用的是 OLS(Ordinary Least Square,普通最小二乘法):所选择的回归模型应该使所有观察值的残差平方和达到最小(如上图左)。
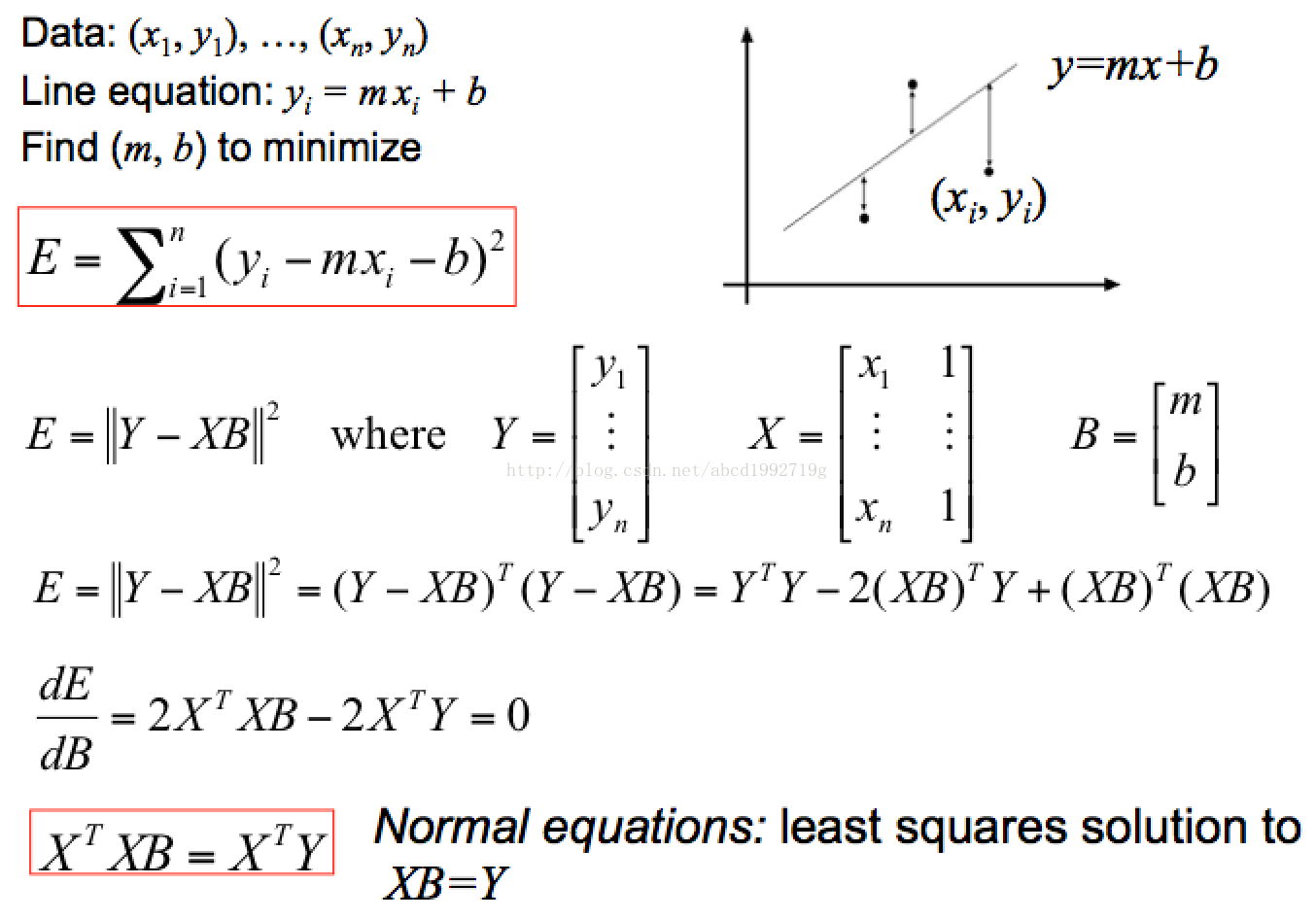
- 直接通过矩阵运算,容易得出:$B = (X^T X)^{-1}(X^T Y)$(拟合多项式:$y = b_0 + b_1 x + b_2 x^2 + … + b_k x^k$)
-
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21// Gary: O-Least-Square最小二乘拟合
Segment::LocalLine Segment::fitLocalLine(const std::list<Bin::MinZPoint> &points) {
const unsigned int n_points = points.size();
// 构造 X/Y 矩阵
Eigen::MatrixXd X(n_points, 2);
Eigen::VectorXd Y(n_points);
unsigned int counter = 0;
for (auto iter = points.begin(); iter != points.end(); ++iter) {
X(counter, 0) = iter->d;
X(counter, 1) = 1;
Y(counter) = iter->z;
++counter;
}
// 计算 B
const Eigen::MatrixXd X_t = X.transpose();
const Eigen::VectorXd result = (X_t * X).inverse() * X_t * Y;
LocalLine line_result;
line_result.first = result(0);
line_result.second = result(1);
return line_result;
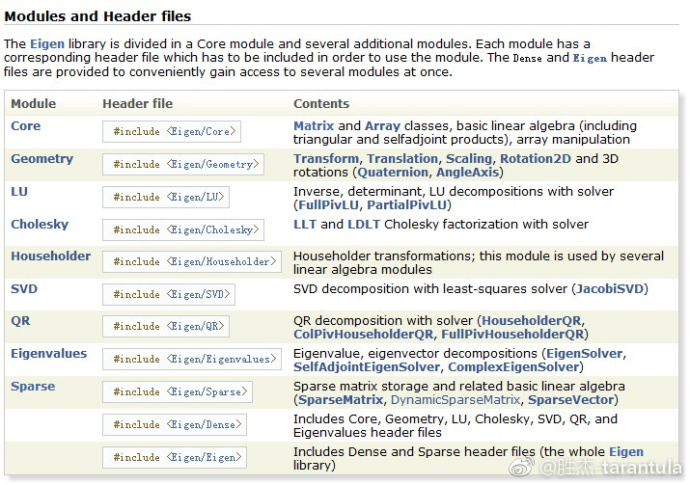
}Eigen 是C++中可以用来调用并进行矩阵计算的一个库,里面封装了一些类。
- 通过解 $XB = Y$ 我们就能解出 $B = [m \space b]$:$$m = \frac{\sum x_i^2 \sum y_i - \sum x_i (\sum x_i y_i)}{n \sum x_i^2 - (\sum x_i)^2}$$ $$b = \frac{n \sum x_i \sum y_i - \sum x_i (\sum x_i y_i)}{n \sum x_i^2 - (\sum x_i)^2}$$
-
1
2
3
4
5
6
7
8
9
10
11OrdinaryLeastSquare(const vector<double>& x, const vector<double>& y) {
double t1=0, t2=0, t3=0, t4=0;
for(int i=0; i<x.size(); ++i) {
t1 += x[i]*x[i];
t2 += x[i];
t3 += x[i]*y[i];
t4 += y[i];
}
m = (t3*x.size() - t2*t4) / (t1*x.size() - t2*t2);
b = (t1*t4 - t2*t3) / (t1*x.size() - t2*t2);
}
- OLS 这种 least square 存在问题,比如针对垂直线段就不行,于是引入第二种 Total Least Square。
.png)
.png)
- 其中,$U = \begin{bmatrix} x_1 - \overline{x} & y_1 - \overline{y} \\ \vdots & \vdots \\ x_n - \overline{x} & y_n - \overline{y} \end{bmatrix}$;
- $\frac{dE}{dN} = \frac{d(N^T U^T U N)}{dN} = U^T U N + N^T U^T U$,因为 $U^T U$ 是一个对称矩阵($U^T U = (U^T U)^T$),$U^T U N = N^T U^T U$,所以 $\frac{dE}{dN} = 2(U^T U)N$;
- 此外,$U^T U = \begin{bmatrix} \sum (x_i - \overline{x})^2 & \sum (x_i - \overline{x})(y_i - \overline{y}) \\ \sum (x_i - \overline{x})(y_i - \overline{y}) & \sum (y_i - \overline{y})^2 \end{bmatrix}$ 是关于 X、Y 的一个二阶矩(随机变量平方的期望)矩阵(second-moment matrix);
- 二阶矩矩阵 $U^T U$ 的最小特征值对应的特征向量即为求解的 $N = [a \space b]$
- 特征值 & 特征向量
设 $A$ 为 n 阶矩阵(n × n),若存在常数 $λ$ 及 n 维非零向量 x(n × 1),使得 $Ax=λx$,则称 $λ$ 是矩阵 $A$ 的 特征值,$x$ 是 $A$ 属于特征值 $λ$ 的 特征向量。
- $eig(U^T U) = [V, D]$,$V$ 是特征向量阵(每列为一个特征向量),$D$ 特征值对角阵 $\Longrightarrow$ 寻找 $D$ 中特征值最小的对角元素对应的特征向量即为 $U^T U$ 最小特征值对应的特征向量
特征值分解:$U^T U = V D V^{-1}$
- 通过 SVD(奇异值)求解
- $SVD(A) = [U, S, V]$,即 $A = USV^T$
﹢其中 $U$ 是一个
m*m的正交阵(Orthogonal matrix:满足 $U U^T = I$ 或者 $U^T U = I$ 的 n 阶方阵,其中 $I$ 为 n 阶单位阵),$S$ 是一个m*n的对角阵(Diagonal matrix:主对角线之外的元素皆为 0 的矩阵,对角线上的元素可以为 0 或其他值),对角线上的元素为 $A$ 的奇异值(Singular value),$V$ 是一个n*n的正交阵。$U$ 的 m 个列向量为 $A$ 的左奇异向量(Left singular vector),$V$ 的 n 个列向量为 $A$ 的右奇异向量(Right singular vector)。$S$ 完全由 $A$ 决定和 $U$、$V$ 无关;
﹢$A$ 的左奇异向量($U$)是 $A A^T$ 的特征向量;$A$ 的右奇异向量是 $A^T A$ 的特征向量。
﹢$A$ 的非零奇异值是 $A^T A$ 特征值的平方根,同时也是 $A A^T$ 特征值的平方根。 - 寻找 $S$ 中最小奇异值对应的 $V$ 的右奇异向量即为 $A^T A$ 最小特征值对应的特征向量。
- $SVD(A) = [U, S, V]$,即 $A = USV^T$
- 特征值 & 特征向量
-
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
using namespace Eigen;
using namespace std;
int main() {
// Eigenvalue
// typedef Matrix<int, 3, 3> Matrix3d
Matrix3d A;
A << 1, 2, 3, 4, 5, 6, 7, 8, 9;
cout << "Here is a 3x3 matrix, A:" << endl << A << endl << endl;
EigenSolver<Matrix3d> es(A.transpose() * A);
// 对角矩阵,每一个对角线元素就是一个特征值,里面的特征值是由大到小排列的
Matrix3d D = es.pseudoEigenvalueMatrix();
// 特征向量(每一列)组成的矩阵
Matrix3d V = es.pseudoEigenvectors();
cout << "The eigenvalue matrix D is:" << endl << D << endl << endl;
cout << "The eigenvector matrix V is:" << endl << V << endl << endl;
// 特征值分解
// cout << "Finally, V * D * V^(-1) = " << endl << V * D * V.inverse() << endl;
// 特征值&特征向量
cout << "min-eigenvector & min-eigenvalue" << endl;
cout << " <1> The min-eigenvalue for A^T*A:" << endl << D(D.rows()-1, D.rows()-1) << endl;
cout << " <2> The min-eigenvector for A^T*A:" << endl << V.col(V.cols()-1) << endl;
cout << " <3> (A^T*A)*min-eigenvector =" << endl << (A.transpose()*A) * V.col(V.cols()-1) << endl;
cout << " <4> min-eigenvalue*min-eigenvector =" << endl << D(D.rows()-1, D.rows()-1)*V.col(V.cols()-1) << endl << endl;
// SVD
// Eigen::ComputeThinV | Eigen::ComputeThinU
Eigen::JacobiSVD<Eigen::Matrix3d> svd(A, Eigen::ComputeFullV | Eigen::ComputeFullU);
Eigen::Matrix3d S = svd.singularValues().asDiagonal();
//得到最小奇异值的位置
Matrix3d::Index minColIdx;
svd.singularValues().rowwise().sum().minCoeff(&minColIdx);
cout << "The left singular vectors U is:" << endl << svd.matrixU() << endl << endl;
cout << "The singular-value matrix S is:" << endl << S << endl << endl;
cout << "The right singular vectors V is:" << endl << svd.matrixV() << endl << endl;
cout << "The SVD: USV^T =" << endl << svd.matrixU()*S*svd.matrixV().transpose() << endl << endl;
// 奇异值与特征值的关系
cout << "The S^2 is:" << endl << S*S << endl << endl;
cout << "The min-eigenvector for A^T*A:" << endl << svd.matrixV().col(minColIdx) << endl;
return 0;
}- $d = a \overline{x} + b \overline{y}$;
- 最终得到的拟合直线:$y = -\frac{a}{b} x + \frac{d}{b}$
其他直线拟合方法
﹢基于 RANSAC(RANdom SAmple Consensus)(随机抽样一致) 的直线拟合
- 示例
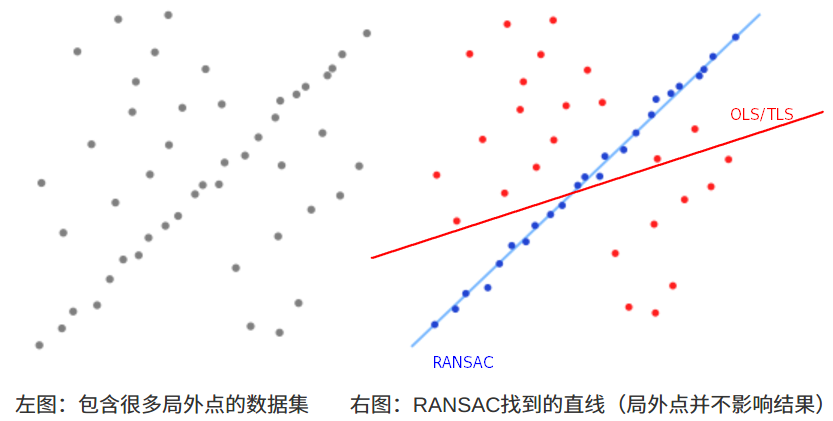
(1)从一组观测数据中找出合适的2维拟合直线,观测数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线(如上图);
(2)简单的 最小二乘法 不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点;RANSAC 能得出一个仅仅用局内点计算出模型,并且概率还足够高。 - RANSAC 通过反复选择数据中的一组随机子集来达成目标(被选取的子集被假设为局内点),并用下述方法进行验证:
- ①:有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
- ②:用①中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
- ③:如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理;用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过,通过估计局内点与模型的错误率来评估模型。
- ④:①-③这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。